 |
|
Como objetivo principal se tiene el controlar con suavidad un motor DC de manera analógica y con esto lograr el ajuste del ángulo del mismo, en base al set point. Con lo expuesto anteriormente se determino el uso de un PID analógico implementado con amplificadores operacionales, los cuales se encargan de la resta entre el valor deseado y la salida medida del sistema dando el error del sistema, el cual alimenta la etapa de amplificadores operacionales en modo proporcional, integrativo y derivativo en sus entradas y luego a sus salidas las sumamos en otra etapa de opam y con esto lograr tener una señal de control a su salida que nos maneje el motor DC satisfactoriamente en función de la entrada deseada.
Materiales principales utilizados:
- Varias resistencias de 10K y 100K.
- 6 Amplificador operacional de uso general LM741.
- Transistores complementarios BJT TIP32C y TIP31C.
- 2 Potenciómetros de precisión de 100k para el PID.
- 1 Potenciómetros de precisión de 50k para el PID.
- 2 Potenciómetros normales de 100K para el error y el set point.
- 2 Disipadores de calor para la etapa de potencia.
- 1 Motor DC a 12v.
- 3 Engranajes de distintos tamaños mismos dientes.
 |
 |
| Datasheet del amplificador operacional OPAM LM741 de uso general muy usado desde hace mucho tiempo por su gran versatilidad y bajo costo pero que en la actualidad se esta quedando corto por sus características antiguas, pero para practicas universitarias es mas que suficiente. |
Vista real del LM741 donde se observando un encapsulado DIP de 8 pines con separación de pines de 2.54mm. |
 |
 |
| Datasheet del TIP31C transistor BJT NPN de potencia muy usado en proyectos en la universidades por su buen desempeño y bajo costo, en comparación con otros modelos con un soporte mayor de corriente o de otra tecnologia ya sea FET o IGBT que aumenta su costo para ser usado en proyectos pequeños. |
Vista real de TIP31C donde se observando un encapsulado TO-220 de 3 pines con separación de pines de 2.54mm y cuenta un disipador trasero con un orificio para ser anclado a un disipador de calor de caracteristicas suficientes para ventilar el calor del transistor segun su potencia de trabajo. |
 |
 |
| Datasheet del transistor de potencia BJT TIP32C que es el transistor complementario del anterior visto con mismas características al anterior pero este es PNP. |
Vista real del TIP32C el cual tiene las mismas características del anterior mencionado al ser su complementario pero este es PNP. |
 |
Configuración usada con 3 engranajes en serie donde se tiene un engranaje loco central y dos engranajes a los extremos donde se multiplica el torque del motor pero se pierden RPM a su salida en el engranaje opuesto. |
 |
Ejemplo de motor DC en el caso del proyecto se uso uno con un voltaje de trabajo de 12v para estar acorde con los voltajes de alimentación usados al momento del diseño del esquemático. |
Diagrama de proyecto:
Este no es mas que una configuración PID con OPAMs de uso general
donde tenemos una etapa principal visto desde la entrada a mano
izquierda, la cual es un amplificador con entrada de un potenciómetro
que proporciona el error en la salida final y otra entrada que permite
ingresar el punto set point deseado para la salida, este amplificador
esta en modo de restador inversor de ganancia 1, logrado con el uso
de resistencias del mismo valor (100k) y con esto no afectar el valor de
salida de la resta, valor el cual es usado por 3 etapas mas como su
entrada en la sección central del esquema.
Etapa 1 amplificador inversor ganancia variable, ajustado con el
potenciómetro R3 y resistencias del mismo valor (10K) y con
esto obtener una salida proporcional a la entrada donde se varia
su ganancia según se necesite.
Etapa 2 amplificador integrador inversor de ganancia variable, con el
potenciómetro R2 y resistencias del mismo valor (10K) y con esto
obtener una salida del valor de la integral de la entrada donde se varia
su ganancia según se necesite.
Etapa 3 amplificador derivador inversor de ganancia variable, con el
potenciómetro R4 y resistencias del mismo valor (10K) y con esto
obtener una salida del valor de la derivada de la entrada donde se varia
su ganancia según se necesite.
Luego estas tres salidas entran a un amplificador operacional
configurado como un sumador inversor ganancia 1, con el uso de
resistencias del mismo valor (10k) y con esto no amplificar la
suma obtenida a la salida del mismo.
Finalmente se observa un amplificador operacional que gobierna
una etapa de potencia constituida por dos transistores BJT en par
complementarios para manejar la carga de corriente del motor DC,
este amplificador operacional mencionado esta en configuración
de seguidor de voltaje, donde se toma una muestra de la salida de
etapa de potencia para siempre obtener el mismo valor de salida
del amplificador operacional pero con un mayor manejo de
corriente gracias a la etapa de potencia que controla.
 |
 |
| Esquema del control pid analogico con amplificadores operacionales tipo 741 el cual es de uso general y muy usado. |
Diseño final de la PCB del control pid donde se posiciono los opanes de una manera que se aprecie correctamente su funcion en reacion con el esquemático del mismo. |
Imágenes del proyecto finalizado:
|
 |
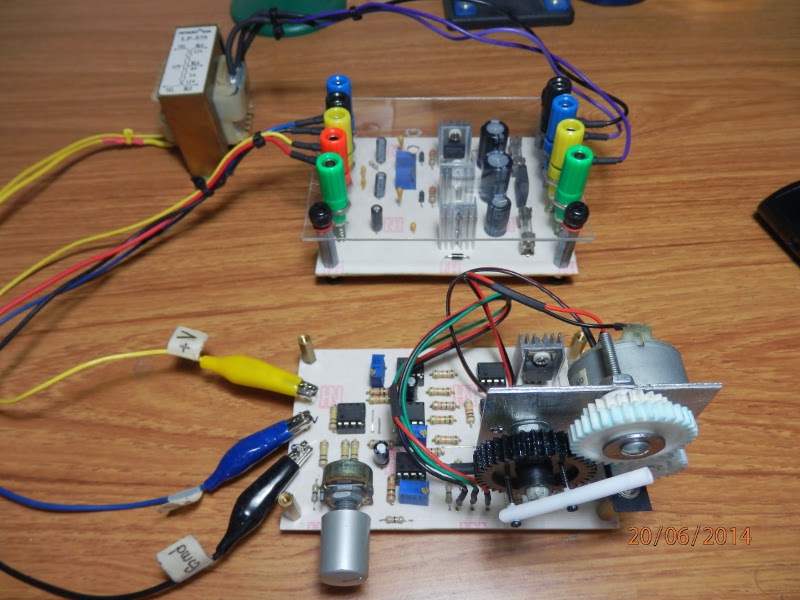
| Vista 1 del proyecto potenciómetro a la izquierda junto al engranaje de posicionamiento. |
Vista 2 del proyecto potenciómetro alcentro junto al engranaje de posicionamiento. |
 |
 |
| Vista 3 del proyecto potenciómetro a la derecha junto al engranaje de posicionamiento. |
Vista del proyecto desde la parte de atras donde se observa el cableado del motor y del potenciómetro de posicionamiento. |
 |
 |
| Vista del proyecto desde arriba donde se aprecia la forma en la que se organizo los opanes para coincidir con el lugar del esquemático. |
Proyecto conectado a la fuente que le surte de los voltajes -12v, 12v y gnd, necesarios para el funcionamiento del mismo. |
Video del proyecto funcionando:
Aca se puede apreciar como es el seguimiento del posicionamiento del motor
en relación al giro del potenciómetro de (set point) o el punto deseado en el
que se desea colocar la aguja plástica del engranaje.
Bibliografía, Web, Datasheet:
- Web:
- Datasheet (Hoja de datos):



hey Jhon! aqui un companero de controles de Urbe, muchas gracias por tu proyecto, muy bien explicado y los detalles son geniales.
ResponderEliminarHe tomado como referencia ciertos parametros de tu controlador para un proyecto de lab de sist de contrl y desde que te vi que usas eagle empece a usarlo tambien.
Eres una inspiracion chamo.
Gracias pana se hace lo que se puede y cuando puedo lo monto a ver a quien le puede ser de ayuda
Eliminargracias muy bueno
ResponderEliminarque otras cosas puedo hacer con el PID? y otra consulta porque hay otros circuitos que solo tienen 3 amp op?
EliminarBuenas amigo tendría que ver el circuito con solo 3 opam pero es posible que sea un pi, pd o alguna otra variante de pid, ya que hay procesos en los cuales no se necesita los 3 partes del pid, porque simplemente su efecto no mejoraría el resultado final y usos del pid pueden ser control de nivel, temperatura, velocidad, etc. Pero este pid publicado es para el control del motor dc emulando un servo motor.
EliminarDel esquema que me mostraste de solo 3 opam, la configuración es de esta manera el primero resta el error de la salida con el set point con un opam en sumador, ahora el segundo segmento es un opam amplificando que en nuestro coso nos entrega la respuesta proporcional y finalmente esta el opam que se retro-alimenta de la salida del par complementario de transistores, para funcionar como una especie de driver de los mismos y con ello controlarlo por medio de las señales de las secciones de atrás del esquema
ResponderEliminarentonces este no seria un PID
ResponderEliminarEs un lazo donde solo se usa el efecto proporcional, donde nos quedaría un PID donde el I y el D son 0, o simplemente le dices que es un P ya que es solo proporcional
EliminarHola amigo muy buen proyecto, yo tengo una duda, veras soy de nuevo ingreso en la facultad y no se que sean esa cajitas azules pequeñas, lo demas si lo entendi y el diagrama tambien solo que esas cajitas pequeñas azules no se que sean, podrias decirme. Gracias!
ResponderEliminarHola Erick, esas cajitas azules no son mas que potenciómetros de precisión verticales con perrilla por la parte de arriba los cuales en algunos lugares son un poco difícil de conseguir pero son los que mas me gusta ya que son multivueltas y se logra un gran ajuste con los mismos
Eliminarinteresante john, grcias por el dato y tus proyectos son muy utiles :)
Eliminarsigue asi
Saludos!!
una duda mas amigo, se pueden reemplazar los pot de presicion por pot normales?
EliminarClaro sin ningún problema de igual manera funcionara correctamente
Eliminarbien ,pero solo seria soldar dos terminales de pot normal no es asi? ya que en tu placa solo veo dos conexiones en el pot de presicion
EliminarA ver los potenciometros son de tres pines normalmente donde se tiene su dos extremos y el central, acá unes un extremo con el centro y la otra pata la dejas sola, de esta manera lo colocas para tus pruebas
EliminarHola John, tengo una duda: en la lista de materiales dice que son 3 pots de precisión de 10K y en el diagrama sólo veo un pot de 10K, ¿podrías decirme cuál es cuál please?
ResponderEliminarHola amigo, a ver coloca los valores que están en el esquemático y me comentas como te va que así lo tengo montado o prueba con 3 potenciómetros de 10k que el PID a ver su comportamiento
EliminarQ tal amigo realice el mismo esquema con amplificadores operacionales para el control de velocidad de un motor DC, pero tengo algunos inconvenientes, me podrías ayudar con tu correo electronico para contactarme contigo directamente, gracias.
ResponderEliminarBuenas amigo que tipo de inconvenientes tienes a la hora de montarlo o probarlo
Eliminarya le escribí a su correo amigo, espero y me pueda ayudar.
EliminarBuen aporte amigo, la verdad me sirvió bastante, esta muy detallado el circuito y esta mas desarrollado que el pid análogo básico,
ResponderEliminarMi pregunta es si hay alguna técnica, o método para calibrar los coeficientes de proporcional, integral y derivativo? o ajusto los trimpot a prueba y error hasta encontrar el mejor ajuste?
A través de matlab puedes obtener los valores amigo..
EliminarBuenas amigo obteniendo la ecuación del circuito de forma correcta y introduciendo la misma en matlab se podría usar simulik para armar el lazo de control y obtener valores, que de hacerlo bien entregaría valores, los cuales se podrían llevar a una posición en % o en Ohm de los potenciometros que preferiblemente usaría los mismos lineales
EliminarBuenas tardes, amigo esta muy bien detallado el esquema muchas gracias por compartirlo, tengo 2 preguntas:
ResponderEliminar1. cual es la funcion del led?
2. puede añadirse un interruptor en la parde P I y D? es decir si solo quiero un PI poder apagar el D y el resto de casos, sin que afecte la salida?
Gracias por tu tiempo :)
Gracias amigo a ver en tu primera pregunta el LED es solo para saber que esta energizado el montaje o placa, donde me doy cuenta que la resistencia del mismo no le modifique el valor, esta debe ser de unos 470 ohm para unos 12v de entrada y con respecto a tu segunda pregunta yo coloraría un terminal de dipswitch en la salida de cada opam, donde se suman las ganancias en el opam IC3, simplemente abriría entre cada una de las resistencias de 10k y el IC3 para que no afecte determinada ganancia las pruebas
EliminarGracias por responder, estoy trabajando en ello para un proyecto de clase, cualquier duda te comento :D
Eliminarhola john, excelente proyecto, estamos haciendo uno basado en este y tenemos algunas dudas:
ResponderEliminar1. al mirar tu montaje y compararlo con el esquema de circuito , observamos que hay algunas diferencias. si lo montamos con el de la imagen esquematica, debe dar normalmente?
2. si cambiamos los potenciometros de precision por potenciometros normales puede dejar de funcionar?.
Buenas amigo así como esta en el blog funciona sin mucho problema, la dificultad esta en hacer una etapa mecánica de forma correcta y ajustar bien los potenciómetros de ganancias de ajuste, los mismos pueden ser de cualquier tipo no solo de precisión.
Eliminargracias john, una ultima duda. todos los potenciometros al moverlos modifican algo o hay algunos que no hacen mucha diferencia al moverlos?. si nos podrias ayudar diciéndonos que funcion o para que sirve cada potenciometro y eso de las ganacias de ajuste te lo agradeceria mucho.
ResponderEliminarmuchas gracias de corazon por ayudarnos en nuestra etapa universitaria, gran labor. saludos desde manizales-colombia
Las ganancias es simplemente el valor que tiene cada POT del PID y se logra girando cada unos de los potenciómetros hasta lograr un correcto funcionamiento y se logre llegar al valor deseado en la salida. Por la otra parte tenemos 3 POT uno para cada etapa P I D, el proporcional (P) no es mas que aumentar el valor o disminuirlo en función de de la entrada de una manera proporcional y con esto obtener una salida la cual en este caso (P) es la velocidad con que el sistema responde a una variación, es decir mientras el valor sea mayor mas rápido llegara al valor deseado o set-point, pero solo con este valor es muy probable que no sea suficiente para el control ya que o llega muy lento al valor deseado o se pasa de el, hasta en algunos casos según sea el sistema nunca se obtenga un control. Si este solo (P) no es suficiente se agrega (I) el valor integral con el cual se intenta atenuar el error que no puede ser controlado por (P) ya que lo comienza a corregir antes de que este suceda y con esto el valor deseado, se puede llegar a el en mas tipos de sistemas. Y finalmente el valor derivativo (D), este en muchos sistemas simples puede no utilizarse, ya que con un (PI) es suficiente para el control, pero en el caso que no sea suficiente actúa en el error que sucede en el tiempo y actúa sobre el al mismo tiempo que sucede. Es decir si con el (PI), todavía no se tiene el control deseado con el (D), se puede mejorar la respuesta del sistema ajustándolo, solo que aveces si este valor no es necesario tiene a empeorar la respuesta. En definitiva según el tipo de sistema y su orden uno puede determinar que partes del PID usar pero ya eso solo es un cuento largo que con el tiempo se va aprendiendo, suerte con su proyecto.
Eliminarhola amigo tengo una duda en la imagen de componentes del pcb el pot del control (I) el potenciometro se alcanza aver que esta al reves o estoy en un error??
ResponderEliminarBuenas amigo no entiendo la pregunta pero en general no importa como coloques el potenciómetro mientras su pin de ajuste wiper este bien conectado, los otros dos son los pines de alimentación.
EliminarEste comentario ha sido eliminado por el autor.
ResponderEliminarHola mucho gusto,disculpa realice tu proyecto pero tengo algunos problemas con el proyecto ya k no funciona me podrías orientar para poder resolverlo xfavor......gracias espero su respuesta o algun correo k tenga.
ResponderEliminarBuenas amigo, que no le esta funcionando? algo que es muy importante y que falla mas es la parte mecanica
Eliminarsiiii es eso, la mecánica amigo necesito de tu ayuda ya que tengo los dias contados para poder entregar o me podrias pasar pasar algun correo o numero donde t pueda localizar por favor n.n gracias espero su respuesta.
ResponderEliminarEsa parte es difícil, no creo poder ayudarte hay entra el ingenio de cada quien y los componentes que estén a mano para realizar la tarea y lograr el giro suave del potenciómetro junto al eje del motor
EliminarBuenas tardes amigo, excelente proyecto, una pregunta, podrías decirme los valores que tu colocaste en los potenciometros de P, I y D, por favor y gracias. Saludos
ResponderEliminarSaludos, Bueno los valores de los potenciómetros están en el esquemático, y su valore establecidos es algo que debes graduar una vez tengas tu prototipo armado ya que los valores cambia según el sistema a trabajar ya que mi prototipo tiene un comportamiento distinto al que tu usaras ya que se usan componentes distintos para hacer cada una de sus partes.
Eliminarporfavor si podrías poner el valor que le pusiste a cada trinpot y ¿cual potenciometro es el que se mueve solo para mover los engranes? gracias
ResponderEliminarBuenas, el valor de los potenciómetros esta en el esquemático y el valor del potenciómetro que se usa para el engranaje es el que aparece a mano izquierda del esquemático y su valor es de 100k.
EliminarHola, gracias por responder pero queria saber ¿si a los otros potenciometros que valor se les tiene que ajustar?
EliminarEse es un valor que tu debes ajustar con pruebas o tratando de seguir algunos de los métodos manuales de entonamiento de PID
Eliminarhola, me podrias decir como hacer un seguidor de linea negra con control PID y con amplificadores operacionales
ResponderEliminarREALICE EL DIAGRAMA PERO GIRA SIN PARAR ¿QUE PUEDO HACER? NO LOGRO POCISIONARLO
ResponderEliminarHola el problema principal es la parte mecánica así que eso se debe ver primero ya que si no es correcto no va andar nunca
EliminarMe genera el mismo problema. Implementé en una protoboard, como 5 veces, y sigue girando sin parar. Alguna recomendación? O algo que no estoy tomando en cuenta?
EliminarPODRIAS ENVIARME TU ARCHIVO PCB Y SI ESTO FUNCIONA PARA EL CONTROL DE UN PENDULO INVERTIDO?
ResponderEliminarHola acá en el post del blog están los archivos para este proyecto y por otra parte para un péndulo se necesitaría algo mas complejo con el uso de microcontroladores
Eliminarse pueden cambiar los TIP por BC558 y BC548??
ResponderEliminarClaro no hay problema solo debe usar transistores complementarios y acordes al consumo del motor.
EliminarHola mi amigo enhorabuena por su proyecto me ayudó mucho, ahora deja que le pregunte una cosa, usted podría enviarme los archivos de Eagle equematico y el borde por favor?
ResponderEliminarHola amigo normalmente subo información suficiente para que se pueda replicar el proyecto sin problemas, gracias
EliminarUn trabajo así es justamente lo que estaba buscando. Voy a armar el proyecto y voy a comentar como sale
ResponderEliminarGracias amigo
EliminarHola una pregunta si me dan el torque como puedo empezar a construir a partir de ahi el PID?
ResponderEliminarA ver amigo este PID analógico, lo ajustas manualmente, luego que tengas todo el prototipo montado
EliminarBuenas, arme el circuito tal cual como esta en el esquema, y anda todo perfecto. Ahora, en tu esquema dice que hay que tener 8 V a la salida, hacia el motor. Yo enciendo el circuito y tengo 7.1 V Esa diferencia de voltaje, no afecta al control de posicion del motor? O si o si tienen que ser 8 V aproximadamente?
ResponderEliminarHola Gaston, a ver de primera si te esta funcionando correctamente, simplemente ajustalo hasta que este lo mejor posible y lo que siempre menciono es que la dificultad es en hacer una parte mecánica correcta, muchas gracias por escribir
EliminarEste comentario ha sido eliminado por el autor.
ResponderEliminarEste comentario ha sido eliminado por el autor.
ResponderEliminarBuenas, el circuito esta completamente armado incluyendo la parte mecánica con los engranajes del motor y los del potenciómetro(error). El motor me responde bien cuando giro el potenciómetro(set point). El problema es que responde a un solo sentido de giro, cuando quiero cambiar de dirección no vuelve, se queda estancado. La única diferencia de mi circuito con tu esquema es que en vez de usar los LM741, use los TL084 para evitar mas pistas en el diseño pero creo que eso no afectaría al circuito. Tenes idea de cual puede ser la falla?
ResponderEliminarPor las dudas aclaro que la parte mecánica y el circuito fueron revisadas y no tienen ningún defecto
EliminarA ver si puedes me pasas alguna foto de la parte mecánica para verla y por otra parte, lo mas tedioso es lograr el punto donde trabaje bien, calibrando con los potenciómetros las distintas componentes del PID y los nuevos OPAM deberían funcionar ya que tienen las características parecidas que nos interesan.
EliminarYa esta solucionado. Era un pequeño error en la etapa de potencia. Anda de 10 tu tu circuito. Me salvaste el final de una materia, sos un genio. Un abrazo
EliminarPerfecto y mas importante es que entiendas el funcionamiento del mismo
EliminarQue puedo hacer si esta girando sin control?
ResponderEliminarDeberías verificar las conexiones y luego el ajuste de los potenciometros y por otra parte siempre es muy importante la parte mecanica
EliminarAmigo! Excelente tu aporte, muchas gracias por compartirlo.
ResponderEliminarMe pregunto si por favor podrías proporcionarme el archivo del PCB de este circuito, pienso mandarlo crear, me lo encargaron como proyecto en la universidad... Te lo agradecería mucho si me lo pudieras proporcionar
Hola Cristian, con el esquemático que esta en imagen podrías montarlo en un protoboard o tal vez usarlo para diseñar la PCB en cualquier software libre que se ofrecen en linea en la actualidad. Si tienes alguna pregunta sobre su funcionamiento es posible que ya este la respuesta en la parte de este mismo chat o si es algo nuevo me comentas.
EliminarAmigo, excelente trabajo, solo quisiera si tienes los calculos tanto del PID como de la planta que usaste, en este caso el motor con sus engranajes, gracias
ResponderEliminarEres un hijo de puta madre por tu culpa reprobé tu diagrama no dice nada para realimentacion de los engranes ⚙️
ResponderEliminarhola, sera que puedas aceptar mi solicitud para el drive ¿, me seria de mucha ayuda ya que no me deja visualizar bien el PSB en la fotografia
ResponderEliminar